Next Steps:
- I need to look at changing the motors for a higher gear ratio, so they will run slower
- I need to pick a method to sense the edge of the table
- Right now it runs with an Arduino Controller, but I was thinking of adding a Raspberry Pi too
What
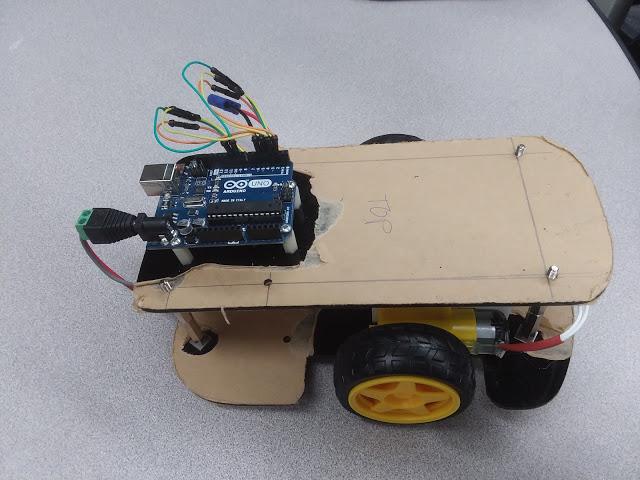
jim.The.STEAM.Clown Did Today:
- Mounted the original motors. These may be too low of a gear ratio for a table top bot. They seem to work fine for on the ground.
- I soldered on wires to the motors and then tested that they worked with a 5 V DC power supply. They worked.
- I then connected the motor controller, and tested the Arduino code. I’ll add links later to the Resource page.
Next Steps:
- I need to look at changing the motors for a higher gear ratio, so they will run slower
- I need to pick a method to sense the edge of the table
- Right now it runs with an Arduino Controller, but I was thinking of adding a Raspberry Pi too
What
jim.The.STEAM.Clown Did Today:
- Created a frame. I looked at lots of 2 wheeled robots, and then sketched a design on plastic. I then cut this frame out. I have not pulled the paper off the plastic yet, as I may want to draw on the spots where I drill more holes... but eventually I'll pull off the paper. But it’s my first car robot… WoHooooooooooo